CHIRURGIA ORTOPEDICA ROBOTICA
La moderna chirurgia del ginocchio sviluppatasi negli ultimi 20 anni grazie ad uno straordinario progresso tecnologico si divide in due grandi settori: quella biologica – ricostruttiva – artroscopica e quella sostitutiva -protesica in ogni caso basate su tecniche innovative e mini-invasive.
Mini-invasività non significa solo accessi chirurgici limitati ma soprattutto rispetto delle caratteristiche anatomiche del paziente, riparazione piuttosto che asportazione ed utilizzo di sistemi computerizzati e robotici che aumentano il livello di precisione e accuratezza permettendo al chirurgo di misurare «ciò che è invisibile agli occhi».
I nostri pazienti oggi sono cambiati, non solo persone che arrivano all’intervento chirurgico perché non riescono più a camminare o a svolgere attività quotidiane elementari ma anche persone che vogliono recuperare uno stato di benessere articolare, mantenere un buon livello di efficienza lavorativa o continuare la loro pratica sportiva. Si tratta quindi di una popolazione decisamente più esigente rispetto al passato per i quali bisogna attuare nuove strategie di cura avvalendosi di soluzione introdotte solo di recente nella pratica clinica.
Chirurgia biologica-riparativa: si avvale oltre che di tecniche artroscopiche per la riparazione dei menischi, dei legamenti o della cartilagine articolare anche di tecniche di correzione di eventuali deformità in varismo o valgismo. L’obiettivo è quello, con un solo intervento chirurgico, di correggere i fattori meccanici (ossei, meniscali e/o legamentosi) che hanno determinato il malfunzionamento dell’articolazione ed allo stesso tempo di indurre una riparazione biologica delle lesioni cartilaginee secondarie con tecniche cellulari di recente introduzione nella pratica clinica. In particolare si è dimostrato efficace l’utilizzo delle cellule mesenchimali totipotenti di derivazione dal pannicolo adiposo che possono essere facilmente prelevate e processate durante lo stesso intervento senza necessità di tempi secondari dovuti a lavorazioni esterne. Le tecniche chirurgiche biologiche di correzione/riparazione generalmente richiedono un ricovero breve, si tratta di un “day hospital” o al massimo di un ricovero di una notte, possono richiedere una convalescenza durante la quale è necessario fare della fisioterapia, ma consentono di “risanare” la propria articolazione senza doverla sostituire in parte o del tutto.
Chirurgia Protesica:
- La protesi di ginocchio è un intervento di successo con una documentata lunga sopravvivenza degli impianti ma circa il 25% dei pazienti risulta insoddisfatta del risultato conseguito. Questa grande variabilità di risultato crea nei pazienti una giustificata diffidenza verso questo intervento chirurgico.
- Un impreciso posizionamento dell’impianto ed un non corretto bilanciamento dei legamenti dell’articolazione sono considerati tra le principali cause di questi “cattivi risultati”.
- Con i sistemi convenzionali generalmente impiegati nella chirurgia protesica di ginocchio sia compartimentale che totale la possibilità di errore nel posizionamento delle componenti è significativa (30%) e la comprensione di quei fattori (allineamento costituzionale, tensione dei legamenti periferici, caratteristiche cinematiche) specifici di ogni paziente e fondamentali per realizzare un corretto impianto è spesso affidata all’esperienza ed alla “sensibilità” dell’operatore.
- I peggiori risultati in termini di livello di soddisfazione e di sopravvivenza stessa della protesi (intesa come necessità di intervento di revisione per fallimento asettico) si evidenziano nei pazienti più giovani ed a più elevata richiesta funzionale, nei pazienti obesi ed in quelli con deformità post-traumatica o con esiti di pregressi interventi chirurgici che rappresentano negli ultimi anni le categorie in maggiore crescita in quanto a richiesta di protesi di ginocchio.

![2-2-3-1[1]](https://www.alessandrotodesca.it/wp-content/uploads/2021/03/2-2-3-11.jpg)
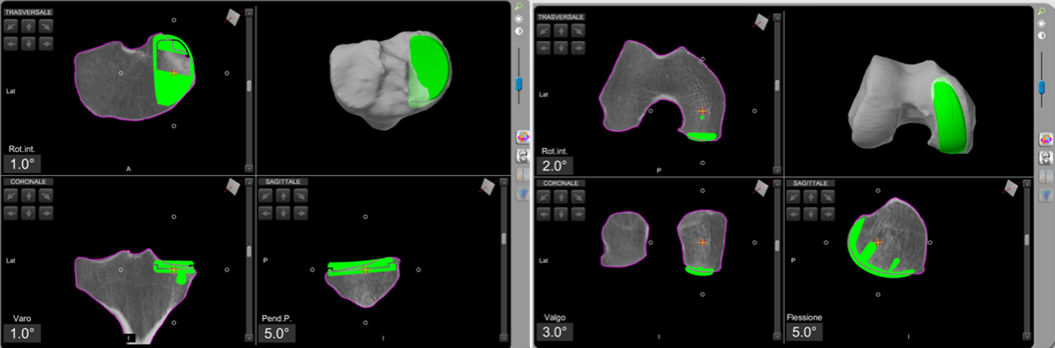
Fig.1: planning di protesi monocompartimentale della regione interna del ginocchio destro. Poter selezionare le componenti delle dimensioni giuste definendone allo stesso tempo il giusto orientamento permette di ricreare la corretta anatomia del singolo paziente.
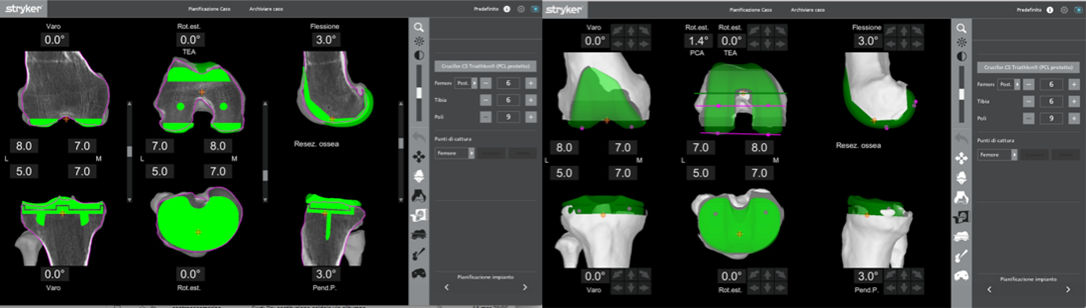
Fig.2: planning di protesi totale del ginocchio destro. Il sistema computerizzato consente di valutare la congruenza dell’impianto protesico in tutti i piani dello spazio prevenendo possibili attriti tra le componenti ed i tessuti molli causa non infrequente di dolore post-operatorio e limitazione nei movimenti.
I sistemi di navigazione computerizzata e soprattutto più recentemente i sistemi robotici hanno dimostrato di migliorare l’accuratezza e la precisione nel posizionamento delle componenti protesiche, permettendo di conseguire un corretto allineamento e bilanciamento legamentoso ripristinando così la fisiologica cinematica dell’articolazione che si traduce in un miglior livello di soddisfazione clinica dei pazienti.
L’obiettivo non quello di standardizzare la procedura chirurgica (tutto sempre uguale per ogni paziente) ma di standardizzare il risultato per garantire un elevato grado di soddisfazione del paziente personalizzando l’impianto scegliendo e posizionando le componenti protesiche in modo di ripristinare le caratteristiche anatomiche e le capacità funzionali di ogni specifica articolazione.
Come funziona il sistema robotico?
- Fase I: realizzazione di un modello virtuale del ginocchio del singolo paziente attraverso uno studio TC preoperatorio che consente una iniziale pianificazione della dimensione (taglia), del posizionamento e dell’orientamento delle componenti protesiche (fig.1, 2);
- Fase II: fase “dinamica “nella quale il chirurgo, dopo aver posizionato delle speciali antenne sul femore e sulla tibia del paziente, collegate attraverso un sistema ad infrarossi al computer che gestisce il robot, con una specie di pennino che gli permette di dialogare col sistema computerizzato (fig.3), trasmette una serie di “informazioni critiche” che consentono di confermare che il modello virtuale effettivamente combacia con la realtà e di valutare in modo dinamico l’entità e la correggibilità della deformità del singolo paziente.

Fig.3: il chirurgo dotato di uno speciale pennino, che tramite una telecamera ad infrarossi dialoga col sistema computer “cervello” del robot, controlla che l’anatomia del ginocchio che sta operando effettivamente combacia perfettamente con il modello virtuale elaborato; si tratta di un passaggio fondamentale per l’accuratezza e la precisione dell’intervento chirurgico.
L’utilizzo sistematico della robotica permette di ricorrere in un maggior numero di pazienti ad impianti “parziali” o compartimentali che con tecnica convenzionale sono gravati da un maggior tasso di fallimento soprattutto nel breve-medio termine (a causa di una maggiore difficoltà nel posizionamento corretto delle parti protesiche con strumentario standard). Le protesi parziali del compartimento femoro-tibiale interno o esterno e della femoro-rotulea (fig. 4, 5, 6) rappresentano i veri impianti “mini-invasivi” per l’accesso chirurgico limitato, assenza di sanguinamento, grande risparmio di tessuto osseo e soprattutto per la preservazione dei legamenti crociati che garantisce caratteristiche cinematiche analoghe a quelle del ginocchio nativo con una possibilità concreta di poter riprendere le attività abituali anche sportive (sci, tennis, etc.).

Fig. 4: Utilizzo di fresa ad alta velocità controllata dal computer per modellare con altissima precisione il femore del paziente dove verrà alloggiata la componente della protesi femoro-rotulea.

Fig. 5: Protesi femoro-rotulea impiantata con tecnica robotizzata: è stata ripristinata la corretta anatomia dell’articolazione permettendo un completo recupero funzionale.

Fig. 6: Controllo radiografico post-operatorio di protesi femoro-rotulea impiantata con tecnica robotizzata.
CHIRURGIA ORTOPEDICA ROBOTICA
La moderna chirurgia del ginocchio sviluppatasi negli ultimi 20 anni grazie ad uno straordinario progresso tecnologico si divide in due grandi settori: quella biologica – ricostruttiva – artroscopica e quella sostitutiva -protesica in ogni caso basate su tecniche innovative e mini-invasive.
Mini-invasività non significa solo accessi chirurgici limitati ma soprattutto rispetto delle caratteristiche anatomiche del paziente, riparazione piuttosto che asportazione ed utilizzo di sistemi computerizzati e robotici che aumentano il livello di precisione e accuratezza permettendo al chirurgo di misurare «ciò che è invisibile agli occhi».
I nostri pazienti oggi sono cambiati, non solo persone che arrivano all’intervento chirurgico perché non riescono più a camminare o a svolgere attività quotidiane elementari ma anche persone che vogliono recuperare uno stato di benessere articolare, mantenere un buon livello di efficienza lavorativa o continuare la loro pratica sportiva. Si tratta quindi di una popolazione decisamente più esigente rispetto al passato per i quali bisogna attuare nuove strategie di cura avvalendosi di soluzione introdotte solo di recente nella pratica clinica.
Chirurgia biologica-riparativa: si avvale oltre che di tecniche artroscopiche per la riparazione dei menischi, dei legamenti o della cartilagine articolare anche di tecniche di correzione di eventuali deformità in varismo o valgismo. L’obiettivo è quello, con un solo intervento chirurgico, di correggere i fattori meccanici (ossei, meniscali e/o legamentosi) che hanno determinato il malfunzionamento dell’articolazione ed allo stesso tempo di indurre una riparazione biologica delle lesioni cartilaginee secondarie con tecniche cellulari di recente introduzione nella pratica clinica. In particolare si è dimostrato efficace l’utilizzo delle cellule mesenchimali totipotenti di derivazione dal pannicolo adiposo che possono essere facilmente prelevate e processate durante lo stesso intervento senza necessità di tempi secondari dovuti a lavorazioni esterne. Le tecniche chirurgiche biologiche di correzione/riparazione generalmente richiedono un ricovero breve, si tratta di un “day hospital” o al massimo di un ricovero di una notte, possono richiedere una convalescenza durante la quale è necessario fare della fisioterapia, ma consentono di “risanare” la propria articolazione senza doverla sostituire in parte o del tutto.
Chirurgia Protesica:
- La protesi di ginocchio è un intervento di successo con una documentata lunga sopravvivenza degli impianti ma circa il 25% dei pazienti risulta insoddisfatta del risultato conseguito. Questa grande variabilità di risultato crea nei pazienti una giustificata diffidenza verso questo intervento chirurgico.
- Un impreciso posizionamento dell’impianto ed un non corretto bilanciamento dei legamenti dell’articolazione sono considerati tra le principali cause di questi “cattivi risultati”.
- Con i sistemi convenzionali generalmente impiegati nella chirurgia protesica di ginocchio sia compartimentale che totale la possibilità di errore nel posizionamento delle componenti è significativa (30%) e la comprensione di quei fattori (allineamento costituzionale, tensione dei legamenti periferici, caratteristiche cinematiche) specifici di ogni paziente e fondamentali per realizzare un corretto impianto è spesso affidata all’esperienza ed alla “sensibilità” dell’operatore.
- I peggiori risultati in termini di livello di soddisfazione e di sopravvivenza stessa della protesi (intesa come necessità di intervento di revisione per fallimento asettico) si evidenziano nei pazienti più giovani ed a più elevata richiesta funzionale, nei pazienti obesi ed in quelli con deformità post-traumatica o con esiti di pregressi interventi chirurgici che rappresentano negli ultimi anni le categorie in maggiore crescita in quanto a richiesta di protesi di ginocchio.
I sistemi di navigazione computerizzata e soprattutto più recentemente i sistemi robotici hanno dimostrato di migliorare l’accuratezza e la precisione nel posizionamento delle componenti protesiche, permettendo di conseguire un corretto allineamento e bilanciamento legamentoso ripristinando così la fisiologica cinematica dell’articolazione che si traduce in un miglior livello di soddisfazione clinica dei pazienti.
L’obiettivo non quello di standardizzare la procedura chirurgica (tutto sempre uguale per ogni paziente) ma di standardizzare il risultato per garantire un elevato grado di soddisfazione del paziente personalizzando l’impianto scegliendo e posizionando le componenti protesiche in modo di ripristinare le caratteristiche anatomiche e le capacità funzionali di ogni specifica articolazione.
Come funziona il sistema robotico?
- Fase I: realizzazione di un modello virtuale del ginocchio del singolo paziente attraverso uno studio TC preoperatorio che consente una iniziale pianificazione della dimensione (taglia), del posizionamento e dell’orientamento delle componenti protesiche (fig.1, 2);
Fig.1: planning di protesi monocompartimentale della regione interna del ginocchio destro. Poter selezionare le componenti delle dimensioni giuste definendone allo stesso tempo il giusto orientamento permette di ricreare la corretta anatomia del singolo paziente.
Fig.2: planning di protesi totale del ginocchio destro. Il sistema computerizzato consente di valutare la congruenza dell’impianto protesico in tutti i piani dello spazio prevenendo possibili attriti tra le componenti ed i tessuti molli causa non infrequente di dolore post-operatorio e limitazione nei movimenti.
Fig.3: il chirurgo dotato di uno speciale pennino, che tramite una telecamera ad infrarossi dialoga col sistema computer “cervello” del robot, controlla che l’anatomia del ginocchio che sta operando effettivamente combacia perfettamente con il modello virtuale elaborato; si tratta di un passaggio fondamentale per l’accuratezza e la precisione dell’intervento chirurgico.
L’utilizzo sistematico della robotica permette di ricorrere in un maggior numero di pazienti ad impianti “parziali” o compartimentali che con tecnica convenzionale sono gravati da un maggior tasso di fallimento soprattutto nel breve-medio termine (a causa di una maggiore difficoltà nel posizionamento corretto delle parti protesiche con strumentario standard). Le protesi parziali del compartimento femoro-tibiale interno o esterno e della femoro-rotulea (fig. 4, 5, 6) rappresentano i veri impianti “mini-invasivi” per l’accesso chirurgico limitato, assenza di sanguinamento, grande risparmio di tessuto osseo e soprattutto per la preservazione dei legamenti crociati che garantisce caratteristiche cinematiche analoghe a quelle del ginocchio nativo con una possibilità concreta di poter riprendere le attività abituali anche sportive (sci, tennis, etc.).
Fig. 4: Utilizzo di fresa ad alta velocità controllata dal computer per modellare con altissima precisione il femore del paziente dove verrà alloggiata la componente della protesi femoro-rotulea.
Fig. 5: Protesi femoro-rotulea impiantata con tecnica robotizzata: è stata ripristinata la corretta anatomia dell’articolazione permettendo un completo recupero funzionale.
Fig. 6: Controllo radiografico post-operatorio di protesi femoro-rotulea impiantata con tecnica robotizzata.